Address behaviour vulnerabilities in the next generation of autonomous robots
- Select a language for the TTS:
- UK English Female
- UK English Male
- US English Female
- US English Male
- Australian Female
- Australian Male
- Language selected: (auto detect) - EN
Play all audios:

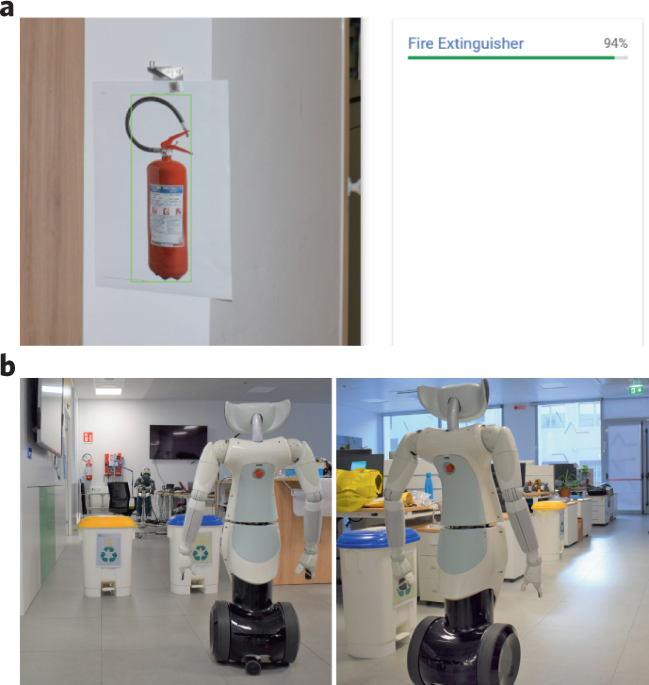
As service and industrial robots enter our lives, new types of cybersecurity issues emerge that involve the manipulation of a robot’s behaviour. Now is the time to develop countermeasures.
Access through your institution Buy or subscribe This is a preview of subscription content, access via your institution ACCESS OPTIONS Access through your institution Access Nature and 54
other Nature Portfolio journals Get Nature+, our best-value online-access subscription $32.99 / 30 days cancel any time Learn more Subscribe to this journal Receive 12 digital issues and
online access to articles $119.00 per year only $9.92 per issue Learn more Buy this article * Purchase on SpringerLink * Instant access to full article PDF Buy now Prices may be subject to
local taxes which are calculated during checkout ADDITIONAL ACCESS OPTIONS: * Log in * Learn about institutional subscriptions * Read our FAQs * Contact customer support REFERENCES *
Ackerman, E. _IEEE Spect._ 6, 103 (2019). Google Scholar * Joe, C. et al. In _Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction_ 211–220 (2020). * Brown,
D. S. & Niekum, S. _Proceedings of the AAAI Conference on Artificial Intelligence_ 33, 7749–7758 (2019). Article Google Scholar * Bogue, R. _Ind. Rob._ 41, 487–492 (2014). Article
Google Scholar * Luckcuck, M., Farrell, M., Dennis, L. A., Dixon, C. & Fisher, M. _ACM Comput. Surv._ 52, 1–41 (2019). Article Google Scholar * Clark, G. W., Doran, M. V. & Andel,
T. R. In _2017 IEEE conference on cognitive and computational aspects of situation management_ 1–5 (2017). * Murino, G., Armando, A. & Tacchella, A. _2019 11th International Conference
on Cyber Conflict (CyCon)_ 900, 1–19 (2019). Google Scholar * Gupta, R. Kurtz, Z. T., Scherer, S. & Smereka, J. M. Preprint at https://arxiv.org/abs/1809.03565 (2018). * Sánchez, C. et
al. _Form. Methods Syst. Des._ 54, 279–335 (2019). Article Google Scholar * Koller, D. & Friedman, N. (MIT press, 2009). * Pang, G., van den Hengel, A., Shen, C. & Cao, L. In
_Proceedings of the 27th ACM SIGKDD international conference on knowledge discovery & data mining_ 1298–1308 (2021). * Ghallab, M., Nau, D. & Traverso, P. _Artif. Intell._ 208, 1–17
(2014). Article Google Scholar * Kaelbling, L. P. & Lozano-Pérez, T. _Int. J. Rob. Res._ 32, 1194–1227 (2013). Article Google Scholar Download references AUTHOR INFORMATION AUTHORS
AND AFFILIATIONS * Istituto Italiano di Tecnologia (IIT), Genova, Italy Michele Colledanchise Authors * Michele Colledanchise View author publications You can also search for this author
inPubMed Google Scholar CORRESPONDING AUTHOR Correspondence to Michele Colledanchise. ETHICS DECLARATIONS COMPETING INTERESTS The author declares no competing interests. RIGHTS AND
PERMISSIONS Reprints and permissions ABOUT THIS ARTICLE CITE THIS ARTICLE Colledanchise, M. Address behaviour vulnerabilities in the next generation of autonomous robots. _Nat Mach Intell_
3, 927–928 (2021). https://doi.org/10.1038/s42256-021-00415-x Download citation * Published: 16 November 2021 * Issue Date: November 2021 * DOI: https://doi.org/10.1038/s42256-021-00415-x
SHARE THIS ARTICLE Anyone you share the following link with will be able to read this content: Get shareable link Sorry, a shareable link is not currently available for this article. Copy to
clipboard Provided by the Springer Nature SharedIt content-sharing initiative